Crédits photos : OpenAI
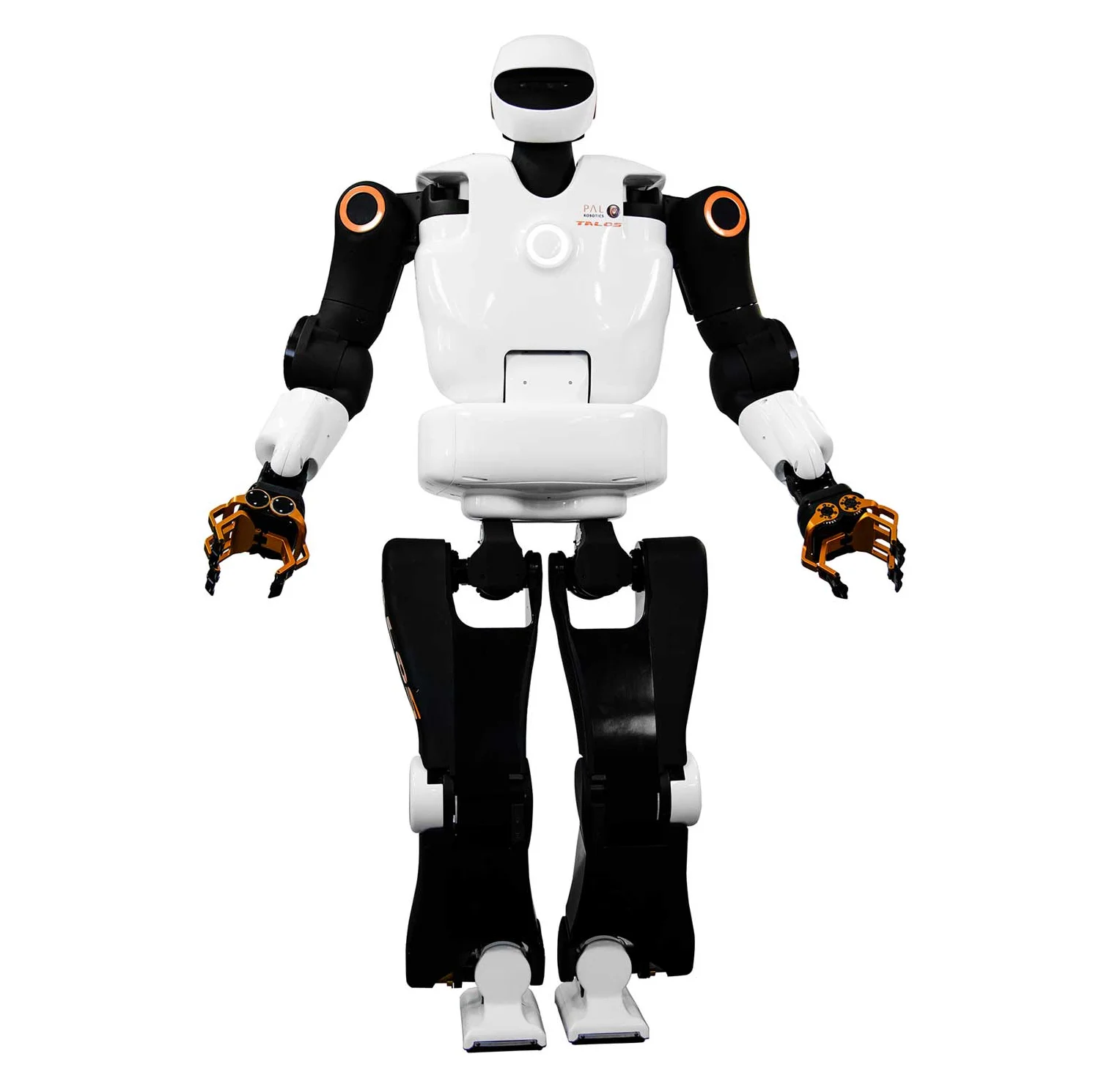
Robot R&D Humanoïde OpenAI Learning Dexterity
Nous avons formé une main de robot ressemblant à un humain pour manipuler des objets physiques avec une dextérité sans précédent.
Catégories : Robot Humanoïde
PAIEMENT & SECURITÉ
Payer avec PayPal
 Payer avec Chorus
Payer avec Chorus
 Payer par Chèque
Payer par Chèque
 Payer avec Bank Transfer
Payer avec Bank Transfer