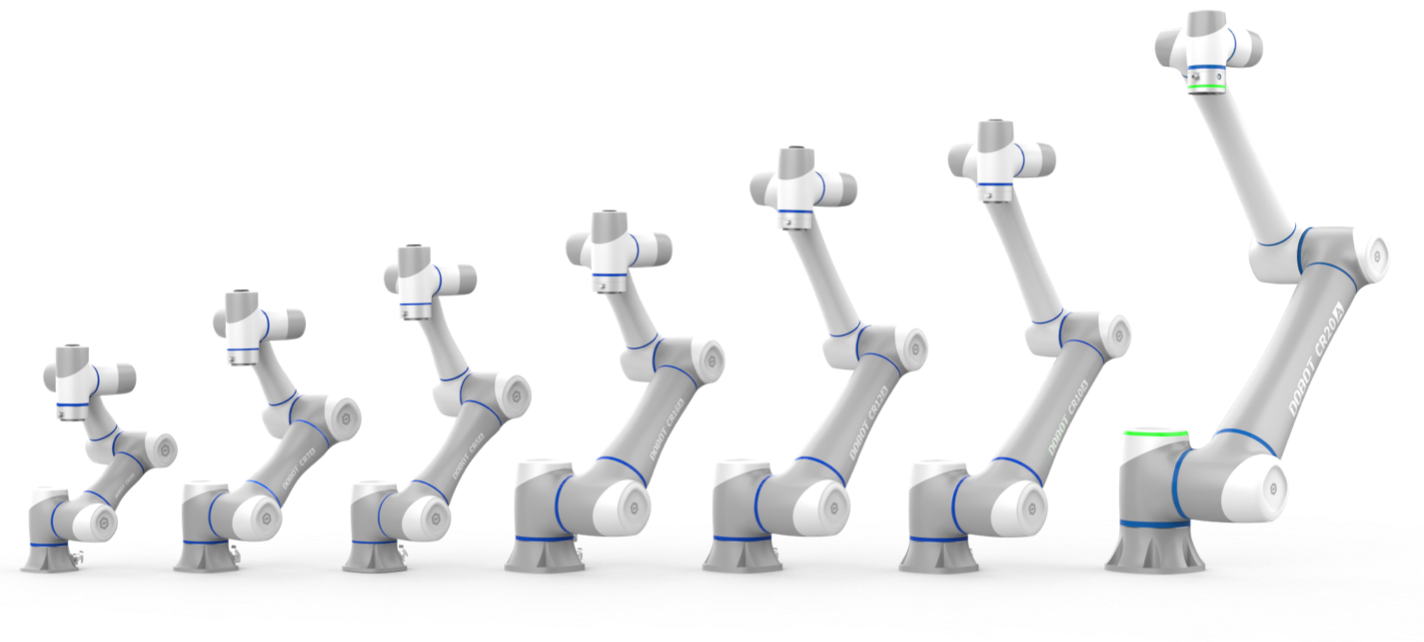
Robot collaboratif
S'appuyant sur la sécurité, l'efficacité, la flexibilité et la facilité d'utilisation de la série CR, le CR3A franchit la limite de charge utile de 3 kg, ouvrant un plus large éventail d'applications pour les robots collaboratifs. Avec un rayon de travail de 620 mm, le CR3A peut répondre aux exigences de la cueillette, de l'emballage, de la palettisation et du soudage lourd dans les industries de l'automobile, de l'électroménager, de la logistique et de la transformation des métaux.

Conception conviviale pour un déploiement plus rapide
Le CR3A adopte une conception d'effecteur d'extrémité à double canal, la première de l'industrie, qui peut se connecter directement à plusieurs outils d'extrémité. Il dispose également d'un indicateur d'état visuel à la base pour une reconnaissance intuitive de l'état de fonctionnement.

Le CR3A a un rayon de travail de 620 mm et une charge utile maximale de 3 kg. Avec un algorithme de contrôle de mouvement avancé, le CR3A fonctionne de manière plus stable, avec des vibrations résiduelles réduites de 50 % lors des arrêts d'urgence à grande vitesse.
24 ports d'interface pour une plus grande flexibilité
Le CR3A prend en charge les protocoles de communication Profinet et Ethernet/IP et se connecte de manière transparente à l'API. Il dispose de 24 ports IO numériques avec un support de pointe pour la commutation PNP et NPN afin d'étendre facilement les applications.

Haut niveau de protection pour une collaboration plus sûre
Le corps du robot et le boîtier de commande atteignent tous deux un niveau de protection élevé d'IP54. Lorsqu'il est surchargé, le robot déclenche automatiquement une alarme. Le CR3A dispose également d'une protection de frein électromagnétique innovante, qui réduit la distance de chute de l'outil final en cas de panne de courant.

Série CRA - robot collaboratif
Brochure technique - Série CRA
 Payer avec Chorus
Payer avec Chorus
 Payer par Chèque
Payer par Chèque
 Payer avec Bank Transfer
Payer avec Bank Transfer