Robot humanoïde bipède professionnel IA XTRON ROBAN Foxtech
UGS : XTR-BOR-ON
28,580.00€ TTC
XTRON Roban est un robot humanoïde bipède de qualité professionnelle qui intègre des technologies avancées d'intelligence artificielle à une conception mécanique précise, dans le but de fournir des services exceptionnels pour l'éducation, la recherche et les applications commerciales.
Équipé de caméras haute résolution et de capteurs de profondeur de lumière structurés, XTRON Roban peut capturer et analyser son environnement en temps réel, réalisant une reconnaissance et une navigation précises des objets.
Traitement du langage naturel
Doté d'algorithmes avancés de reconnaissance vocale et de traitement, XTRON Roban prend en charge plusieurs langues pour les interactions vocales, améliorant ainsi l'expérience utilisateur.
Capteurs multifonctionnels
Intégrés à divers capteurs, y compris des caméras de profondeur, des réseaux de microphones et des capteurs tactiles, XTRON Roban peut percevoir et réagir à des changements environnementaux complexes.
Contrôle flexible du mouvement
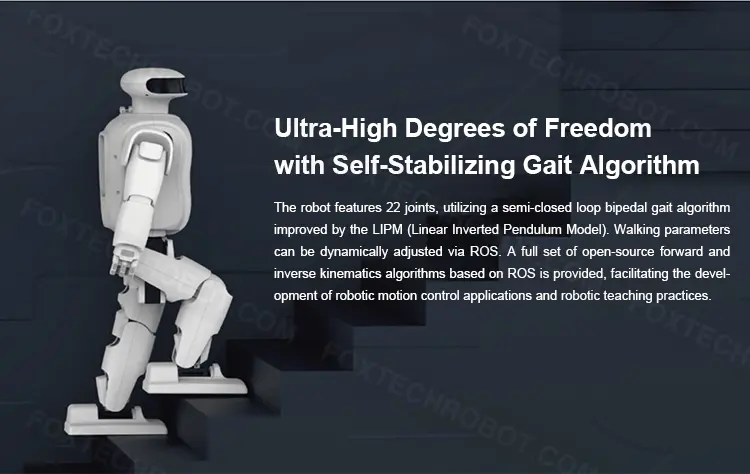
Degrés de liberté ultra-élevés avec l'algorithme de la maile auto-stabilisant. Le robot comporte 22 articulations, utilisant un algorithme de démarche bipède en boucle semi-fermée amélioré par le LIPM (Linear Inverted Pendulum Model). Les paramètres de marche peuvent être ajustés dynamiquement via ROS. Un ensemble complet d'algorithmes de cinématique avant et inverse open source basés sur ROS est fourni, facilitant le développement d'applications de contrôle de mouvement robotique et de pratiques d'enseignement robotique.
Plate-forme ouverte
Construit sur les systèmes d'exploitation ROS et Linux, XTRON Roban offre un riche ensemble d'interfaces API, prenant en charge le développement secondaire et l'expansion fonctionnelle pour répondre à divers besoins d'applications.
Soutien éducatif
XTRON Roban fournit une solution complète de programme d'études couvrant le contrôle des robots, la programmation d'introduction, la vision par ordinateur, le traitement d'image et la planification du mouvement, aidant à cultiver des talents haut de gamme en intelligence artificielle et en robotique.
Conception et capacités
La conception et les capacités de XTRON Roban en font un partenaire idéal dans les domaines de l'éducation, de la recherche et du commerce, aidant les utilisateurs à réaliser des percées dans l'application et le développement des technologies d'intelligence artificielle et de robotique.
Plateforme de démonstration et d'application ROS
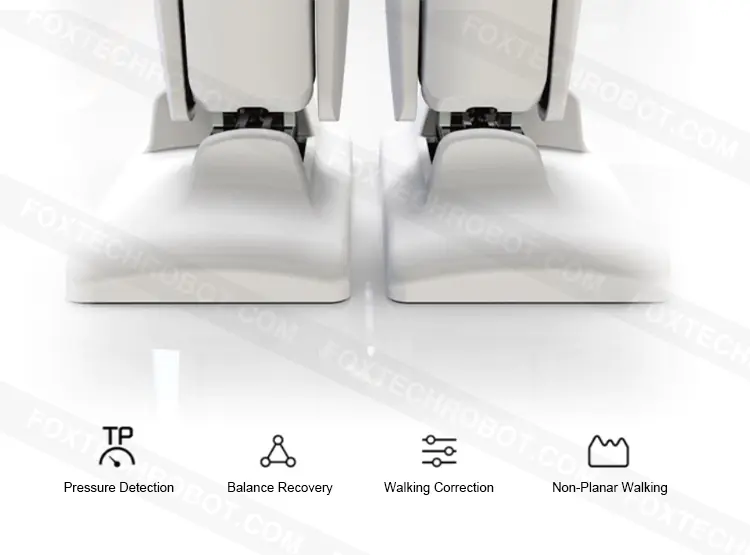
Roban est une plate-forme de démonstration Al open-source et extensible et une plate-forme d'application ROS. Équipé d'une caméra de profondeur et intégré aux algorithmes visuels V-SLAM, il prend en charge la cartographie intérieure et la planification autonome des trajectoires grâce à la technologie de navigation SLAM. Roban peut effectuer des tâches telles que la marche en courbe, le mouvement des pentes et la montée d'escaliers. De plus, il s'intègre à des plateformes comme iFlytek et Microsoft, permettant des capacités complètes d'intelligence, de reconnaissance et d'apprentissage.
Perception Diversifiée, Portée Expansive
La tête dispose d'un réseau de 6 microphones, utilisant les propriétés de filtrage spatial du réseau de microphones pour supprimer efficacement le bruit spatial. Il capture avec précision le son dans la gamme du champ lointain, avec une localisation précise à 360 degrés des sources sonores, ce qui permet d'obtenir une captation audio transparente.
Réveil directionnel et capteur audio amélioré
Fournit des conditions optimales de capture audio pour les applications de reconnaissance vocale dans des environnements bruyants, facilitant le développement et l'application d'algorithmes de PNL et de technologies de reconnaissance vocale.
Capteurs externes
Fournit des ports de connexion magnétique compatibles avec divers capteurs, facilitant les applications dans plusieurs scénarios.
Température
Détecteur Toucher
Détecteur Flamme
Détecteur Interrupteur de collision
Détecteur Lumière
Détecteur Infrarouge passif
Détecteur Gaz dangereux
Construit sur le système d'exploitation ROS et Linux
Roban est construit sur le système Linux et dispose d'un cadre multicouche basé sur ROS. Il offre des interfaces de message et de service ROS pour le contrôle visuel, vocal et global du mouvement, ce qui facilite l'utilisation de diverses boîtes à outils au sein de l'écosystème ROS et réduit la complexité du développement d'applications. En outre, Roban fournit des interfaces complètes de pilotes de bas niveau ROS, prenant en charge les applications pratiques dans les systèmes ROS et l'enseignement de la robotique.
 Payer avec Visa
Payer avec Visa
 Payer avec MasterCard
Payer avec MasterCard
 Payer avec Chorus
Payer avec Chorus
 Payer par Chèque
Payer par Chèque
 Payer avec Bank Transfer
Payer avec Bank Transfer